Impressionante novo mapa colorido de Marte revela a superfície com detalhes sem precedentes: WebCuriosos
Em julho de 2020, a China Tianwen-1 missão chegou em órbita ao redor de Marte, consistindo de seis elementos robóticos: um orbitador, um módulo de aterrissagem, duas câmeras implantáveis, uma câmera remota e o Zhurong rover.
Como a primeira de uma série de missões interplanetárias da Administração Espacial Nacional da China (CNSA), o objetivo da missão é investigar a geologia e a estrutura interna de Marte, caracterizar a sua atmosfera e procurar indícios de água em Marte.
Tal como muitos orbitadores, módulos de aterragem e rovers que actualmente exploram Marte, a Tianwen-1 também está à procura de possíveis evidências de vida em Marte (passado e presente).
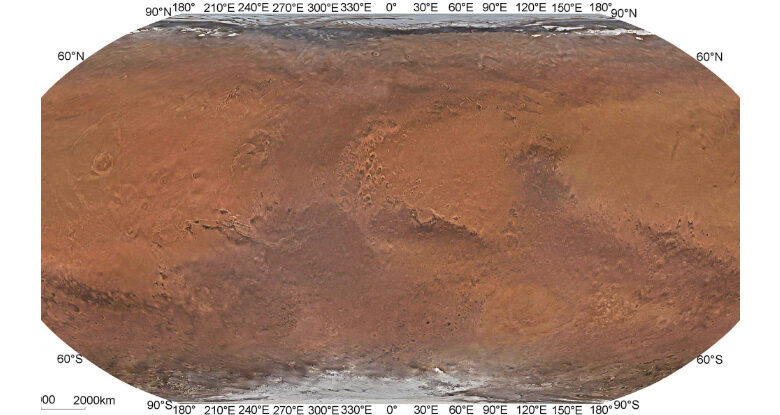
Nos quase 1.298 dias que a missão Tianwen-1 explorou Marte, seu orbitador adquiriu inúmeras imagens de sensoriamento remoto da superfície marciana. Graças a uma equipa de investigadores da Academia Chinesa de Ciências (CAS), estas imagens foram combinadas para criar a primeira mapa global de imagens coloridas de alta resolução de Marte com resoluções espaciais superiores a 1 km (0,62 mi). Este é atualmente o mapa de Marte de maior resolução e pode servir como um mapa base global que algum dia apoiará missões tripuladas.
A equipe foi liderada pelo professor Li Chunlai do Observatórios Astronômicos Nacionais da China (NOAC) e o professor Zhang Rongqiao do Centro de Exploração Lunar e Engenharia Espacial. Eles se juntaram a vários colegas do Laboratório Principal de Exploração Lunar e do Espaço Profundoo Instituto de Óptica e Eletrônicao Universidade da Academia Chinesa de Ciênciase o Instituto de Física Técnica de Xangai. O artigo detalhando sua pesquisa, “Um conjunto de dados de imagens coloridas globais de 76 m por pixel e mapa de Marte por Tianwen-1“, apareceu recentemente na revista Boletim Científico.
Vários mapas globais de Marte foram criados usando imagens de sensoriamento remoto adquiridas por instrumentos a bordo de seis missões anteriores. Estes incluem os sistemas de imagem visual do Marinheiro 9 sonda, o Viking 1 e 2 orbitadores, o Câmera Mars Orbiter – Grande Angular (MOC-WA) a bordo do Pesquisador Global da Mars (MGS), a Câmera de Contexto (CTX) a bordo do Orbital de reconhecimento de Marte (MRO), o Câmera estéreo de alta resolução (HRSC) de Marte Expresso (MEX) e o Sistema de imagem por emissão térmica (TEMIS) no Odisseia de Marte orbitador.
No entanto, todos esses mapas tinham uma resolução espacial significativamente menor do que a que a equipe CAS criou usando imagens adquiridas pelo orbitador Tianwen-1. Por exemplo, o Mosaico Atlas MGS MOC-WA tem uma resolução espacial de 232 metros por pixel (280 jardas por pixel) na banda visível, e o Mosaico Global THEMIS da missão Mars Odyssey oferece uma resolução espacial de aproximadamente 100 m/pixel (~110 pés/pixel) na banda infravermelha. Enquanto o Mosaico CTX Global MRO de Marte cobriu 99,5% da superfície marciana (88° norte a 88° sul) na faixa visível, tem uma resolução espacial de cerca de 5 m/pixel (5,5 jardas/pixel).
Também tem havido uma falta de imagens coloridas globais de Marte com resoluções espaciais de cem metros (110 jardas) ou superiores. Em termos de imagens coloridas globais, o Mars Viking Colorized Global Mosaic v1 e v2 têm resoluções espaciais de aproximadamente 925 m/pixel e 232 m/pixel (~1010 e 255 jardas/pixel), respectivamente.
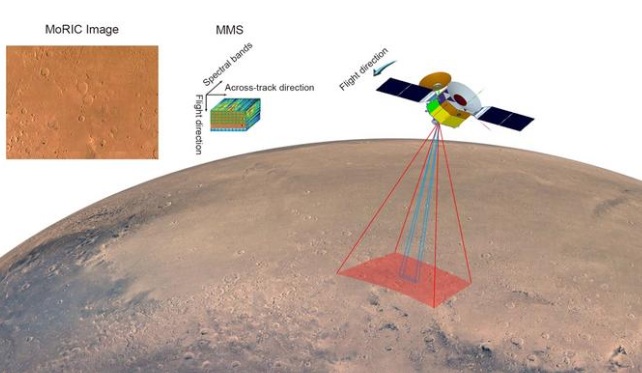
Enquanto isso, o instrumento MoRIC adquiriu 14.757 imagens durante as mais de 284 órbitas executadas pelo orbitador Tianwen-1, com resoluções espaciais entre 57 e 197 m (62 e 215 jardas).
Durante este mesmo tempo, Tianwen-1 Espectrômetro Mineralógico de Marte adquiriu um total de 325 faixas de dados nas bandas do visível e do infravermelho próximo, com resoluções espaciais variando de 265 a 800 m (290 a 875 jardas).
As imagens recolhidas também alcançaram uma cobertura global da superfície marciana. Usando estes dados, o Professor Li Chunlai, o Professor Zhang Rongqiao e os seus colegas processaram os dados da imagem que levaram a este último mapa global de Marte. A equipe também otimizou os dados originais de medição da órbita usando tecnologia de ajuste de pacote.
Ao tratar Marte como uma rede de ajuste unificada, a equipa conseguiu reduzir o desvio de posição entre imagens individuais para menos de um pixel e criar um mosaico global “contínuo”.
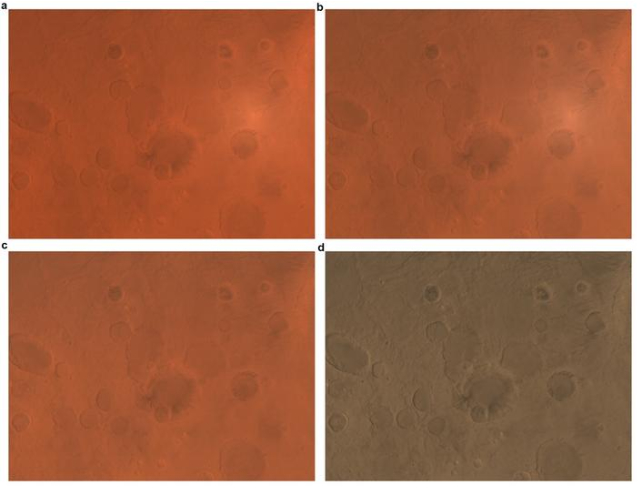
As verdadeiras cores da superfície marciana foram alcançadas graças aos dados adquiridos pelo MMS, enquanto a correção de cores permitiu a uniformidade global das cores. Tudo isso culminou com o lançamento do Tianwen-1 Mars Global Color Ortomosaico 76 m v1que tem resolução espacial de 76 m (83 jardas) e precisão horizontal de 68 m (74 jardas).
Este mapa é atualmente o mapa global de Marte em cores reais de mais alta resolução e melhora significativamente a resolução e a autenticidade das cores dos mapas anteriores de Marte.
Este mapa poderia servir como referência geográfica para outras agências espaciais e organizações parceiras mapearem a superfície marciana com ainda maior resolução e detalhes. Também poderia ser usado pelas agências espaciais para selecionar locais para futuros exploradores robóticos que continuarão a procurar pistas sobre o passado de Marte.
Também poderá ser útil quando a NASA e a China enviarem missões tripuladas a Marte, que estão programadas para começar no início da década de 2030 ou 2040.
Este artigo foi publicado originalmente por Universo hoje. Leia o artigo original.